About

Hey there! My name is George Chen, and I'm a software engineer at Zoox, working on motion planning and controls for autonomous driving! I spent 5 unforgettable years at MIT, earning a Master's degree in mechanical engineering and a Bachelor's degree also in mechanical engineering with a minor in computer science.
My years at the Institute have made me a self-driven fast learner, both in academics and in the industry. Once a subject sparks a tiny bit of my interest, I get carried away unraveling its mysteries, one after another. My dedication has allowed me to gain expertise in the field of controls and robotics, which has an interesting blend of hardware and software. While the courses I took provided me a strong theoretical foundation, my research and internship experiences allow me to apply said knowledge into practical engineering. I am very fortunate to have collaborated with many talented colleagues on innovative and impactful projects, and I continue to seek for such opportunities.
Education
Massachusetts Institute of Technology
M.S. in Mechanical Engineering
Research Interests: Controls, Robotics, System Identification
Aug 2021 - May 2022
B.S. in Mechanical Engineering, Minor in Computer Science
Aug 2017 - Jun 2021
Relevant Coursework
Mechanical Engineering
- 2.001: Mechanics and Materials I
- 2.005, 2.006: Thermal-Fluids Engineering I, II
- 2.671: Measurements and Instrumentation
- 2.678: Electronics for Mechanical Systems
- 2.007: Design and Manufacturing I
- 2.00B: Toy Product Design
- 2.013: Engineering Systems Design (Senior capstone)
Computer Science
- 6.S080: Introduction to Python
- 6.08: Introduction to EECS via Interconnected Embedded Systems
- 6.009: Fundamentals of Programming
- 6.034: Artificial Intelligence
- 6.006: Introduction to Algorithms
- 6.036: Introduction to Machine Learning
Controls and Robotics
- 2.003, 2.004: Dynamics and Controls I, II
- 2.086: Numerical Computation for Mechanical Engineers
- 2.12: Introduction to Robotics
- 2.14: Analysis and Design of Feedback Control Systems
- 6.003: Signals and Systems
- 6.141: Robotics: Science and Systems
Graduate level:
Experience
Expand each one to see more!
SpaceX
Associate Hardware Test Software Engineer
Hawthorne, CA
Jun 2021 - Aug 2021
With the goal of providing internet to remote corners of the world, the Starlink factory is accelerating the production of user terminals. My work brought to life an automated calibration station with PLC logic, instructing robots to execute planned paths, actuate suction cups at the end-effector, and communicate real-time statuses to advance the conveyor line. I drove this project from initial development to deploying to production in the span of 10 weeks. As you are reading this, my robots are now sitting on the Starlink production floor, potentially yielding hundreds of calibrated units per hour.
- Designed, simulated, and commissioned an automated calibration station, using 6DOF ABB industrial robots and test chambers, for high-volume production of Starlink user terminals
- Programmed sequencer logics in a complex Beckhoff PLC system for robots, test chambers, associated sensors, and status communication with conveyor line
- Responsible for continuous optimization and maintenance of deployed station software, including HMI and failure recovery procedures
Dexai Robotics
Robotics Engineering Intern
Somerville, MA
Dec 2020 - Feb 2021
A kitchen assistant robotics startup automating the food assembly process, with robot arm using utensils to scoop and dispense ingredients.
- Refactored C++ codebase to improve data logging coverage during robot executions, wrote Python scripts to parse, analyze, and visualize logged load cell sensor data
- Developed an API that allows Python calls to C++ functions in the codebase, implemented unit and system tests using GoogleTest framework
- Established environment for reinforcement learning training using OpenAI Gym
Waymo (formerly Google's Self-Driving Car Project)
Systems Engineering Intern, Fault Protection
Mountain View, CA
May 2020 - Aug 2020
The autonomous driving company under Alphabet. I developed a software solution to facilitate the System Engineering team's fault analysis efforts, as they rapidly expand to analyze more Operational Design Domains. Despite being virtual, this internship provided me the valuable opportunity to collaborate with colleagues across various teams and disciplines in Waymo.
- Designed and implemented a software tool in Python and XML, incorporating Cameo Systems Modeler and open-source packages, to streamline the process of system representation and fault tree analysis
- Quantitatively analyzed root causes of faults in an autonomous system and their mappings to system-level outcomes and metrics, using Boolean logic and probabilistic models in SysML
Daimler Trucks North America
Product Validation Engineer Intern
Portland, OR
Jun 2019 - Aug 2019
An automotive company that manufactures commercial vehicles, including Freightliner, Western Star, and Mercedes-Benz. I worked in Product Validation Engineering which tests and instruments designed systems on the tractor-trailer trucks prior to production.
- Designed and iteratively prototyped a distributed IMU sensor system to measure articulation angle of instrumentation tractor-trailer trucks in Arduino
- Tested and evaluated performance of the sensor system in MATLAB, optimized its accuracy via sensor fusion with GPS using Kalman Filter, designed interface PCB layout to read and write CAN messages
- Validated ADAS front camera systems by processing recorded videos using computer vision in Python (OpenCV)
- Assisted in engine noise testing and durability testing efforts, assembled brake pressure transducers and CAN bus harnesses for steering / handling tests
Millennium Space Systems, A Boeing Company
Spacecraft Thermal Engineer Extern
El Segundo, CA
Jan 2019
A Boeing-acquired company that designs and manufactures satellites and satellite components. I designed and executed a comparative test in the thermal vacuum chamber to characterize thermal properties of several insulation materials for in-house testing purposes.
- Designed and executed a characterization test in thermal vacuum chamber comparing the effectiveness of multilayer insulation with other reflective materials, analyzed test data using MATLAB and Microsoft Excel
- Composed test plans, test procedures, and memorandum for record for release to Document Control and Management, created drawings of test configurations using Solidworks
- Worked with system engineers and program managers to assist in requirement verification across multiple subsystems for a flight program, ensured action items were in compliance before delivering
MIT Space Systems Laboratory & Lincoln Laboratory: WaferSat
Research Assistant, Thermal Engineering Team
Cambridge, MA
Jan 2018 - Aug 2018
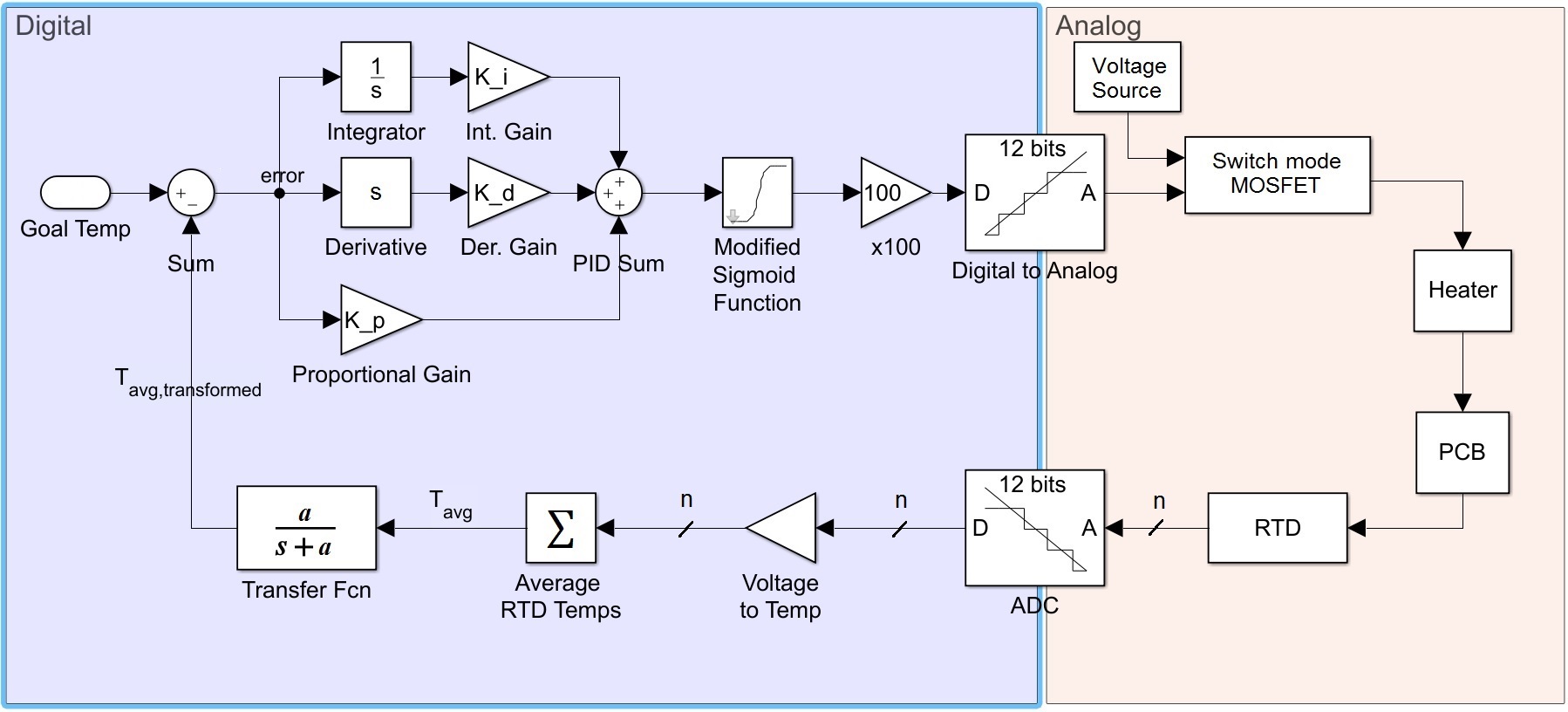
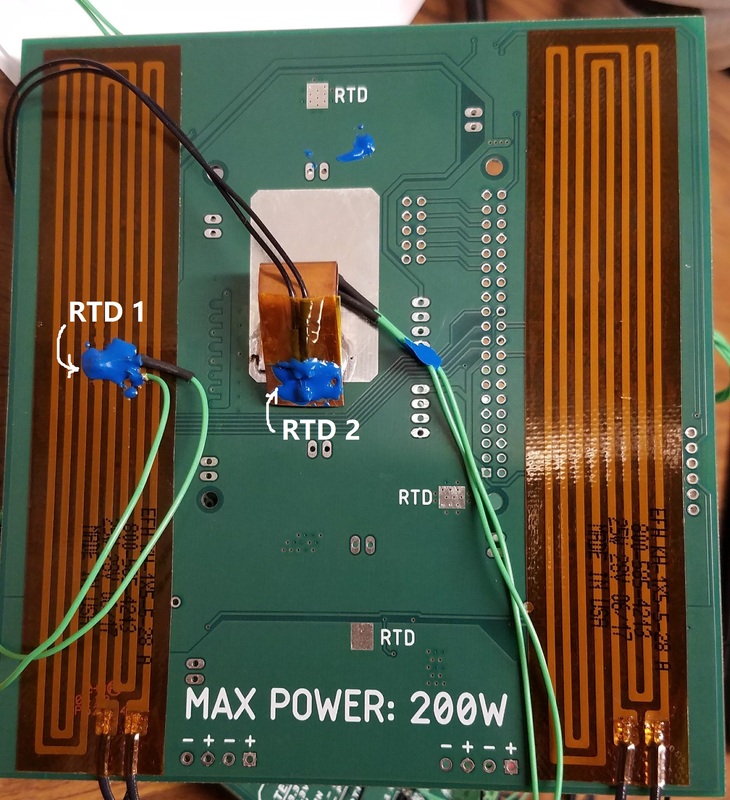
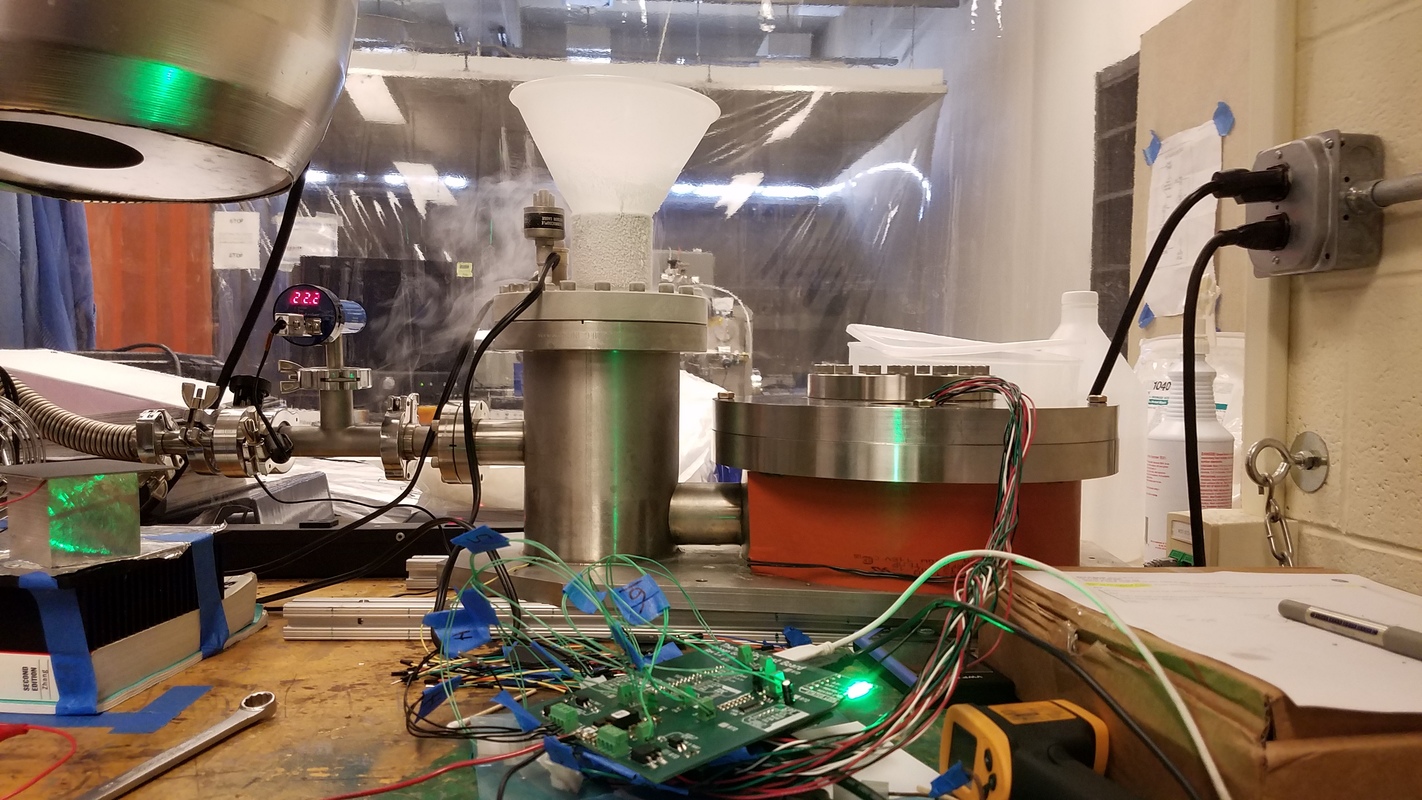
Ongoing research on nanosatellites in the MIT Space Systems Laboratory in conjunction with Lincoln Laboratory. We developed a prototype consisting of an 8-inch-diameter wafer with incorporated microelectronics. I worked with Prof. David Miller and a team of students to develop a PID thermal control system and analyze the thermal properties of the nanosatellite.
- Characterized thermal behaviors of a PCBSat prototype in space-like environment simulated in thermal vacuum chamber
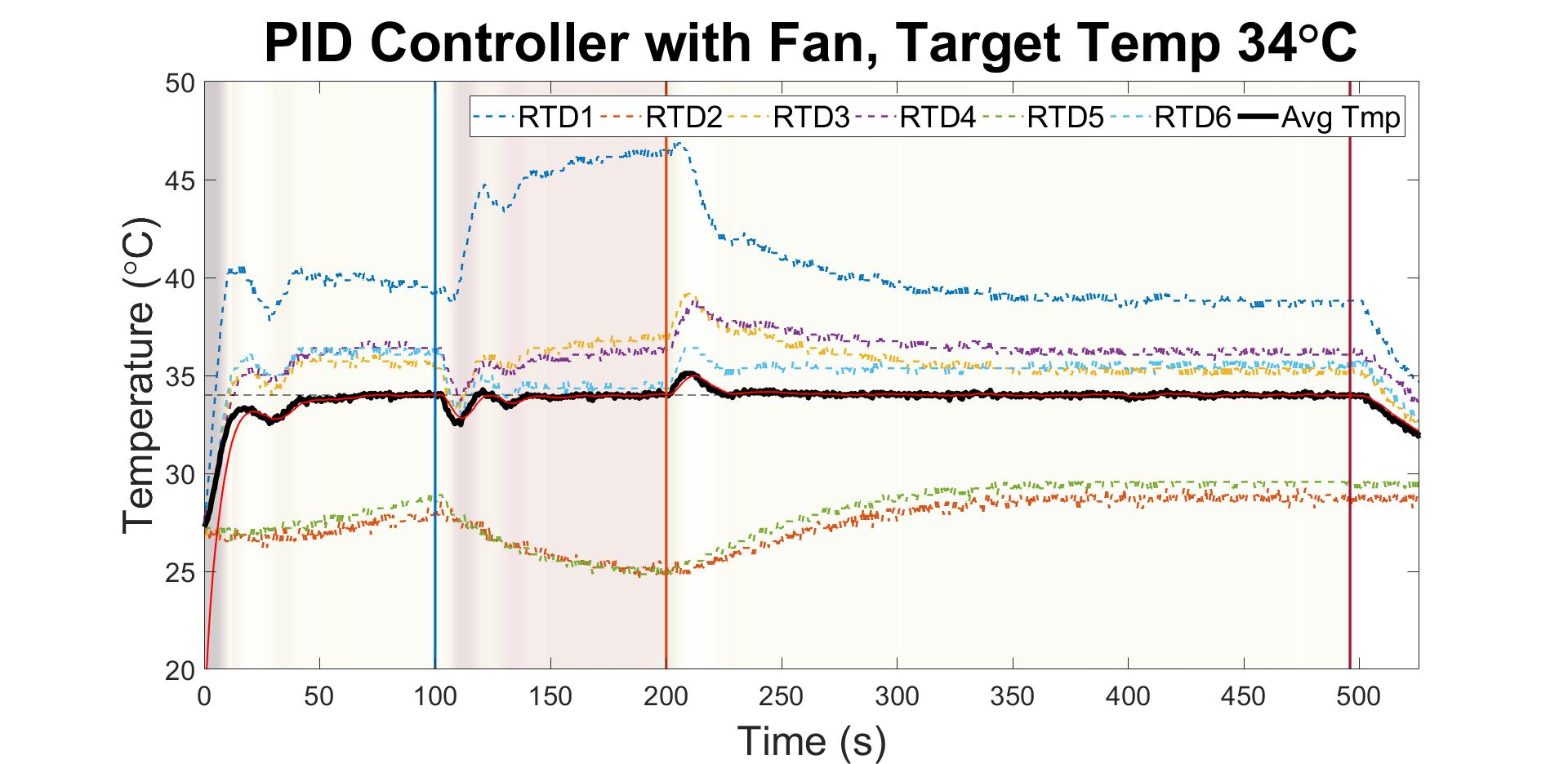
- Developed and optimized PID control algorithm using Python and C++ to maintain steady-state temperature inside thermal vacuum chamber with 40% less power output
- Analyzed temperature signals using MATLAB and correlated with analytical model in Thermal Desktop
- Calculated center of mass and other inertial and dynamic properties of the nanosatellite to ensure orbital stability using Solidworks and Microsoft Excel
Projects
Expand each one to see more!
Aerospace Controls Laboratory
Sept 2019 - Dec 2019
Robotics Research Assistant
Skills used: ROS, Gazebo, C++, Linux
- Analyzed the kinematic tree of a self-balancing Segway robot
- Developed a URDF model in ROS and a working simulation in the Gazebo environment
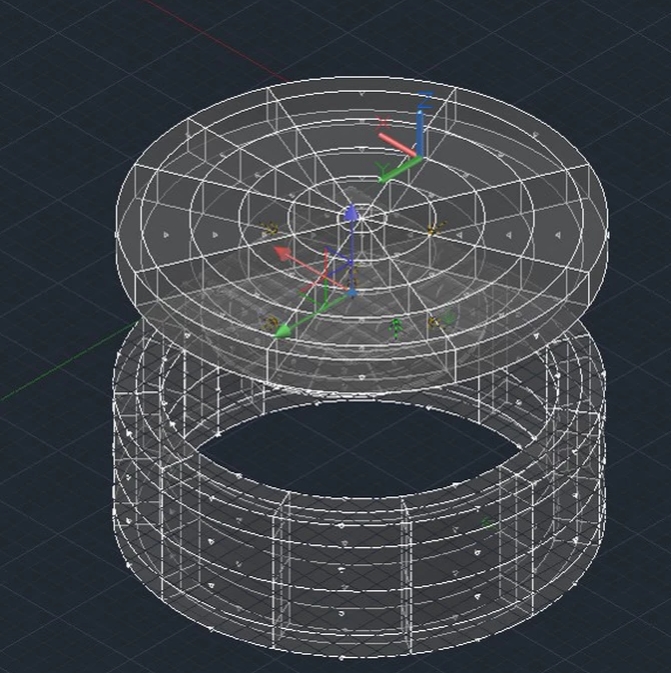
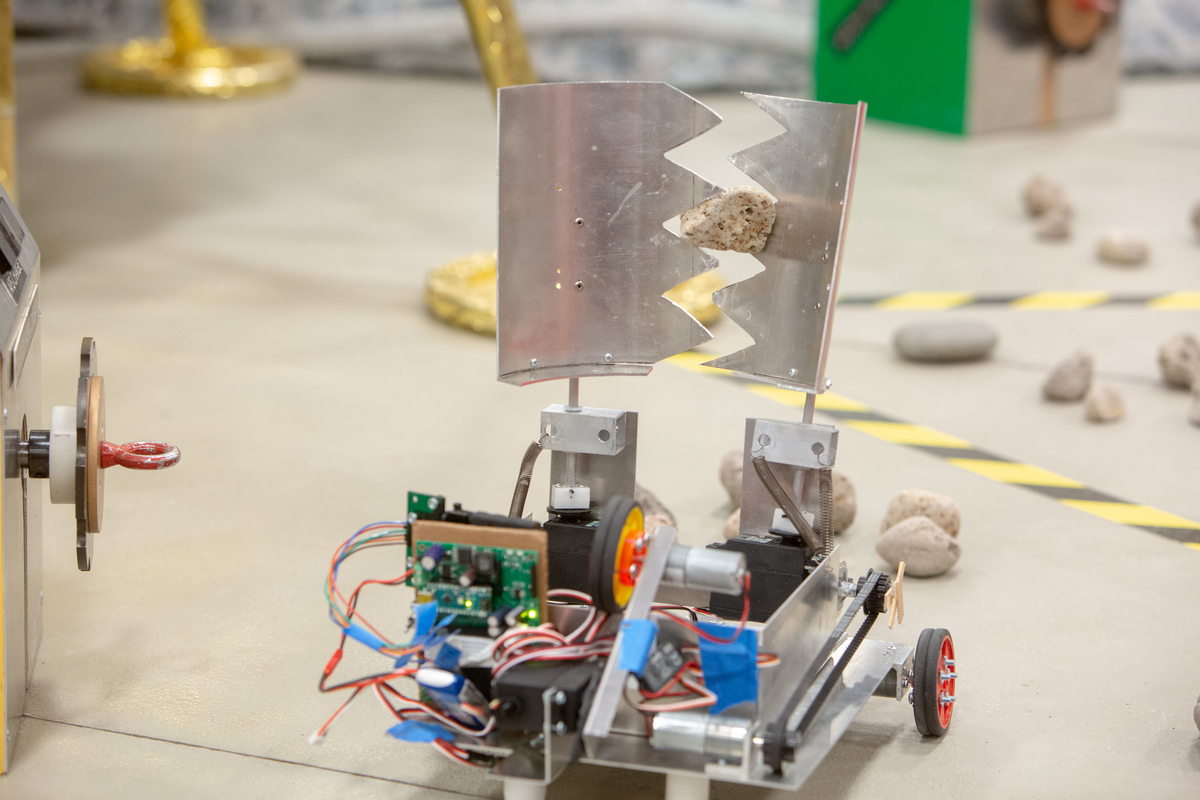
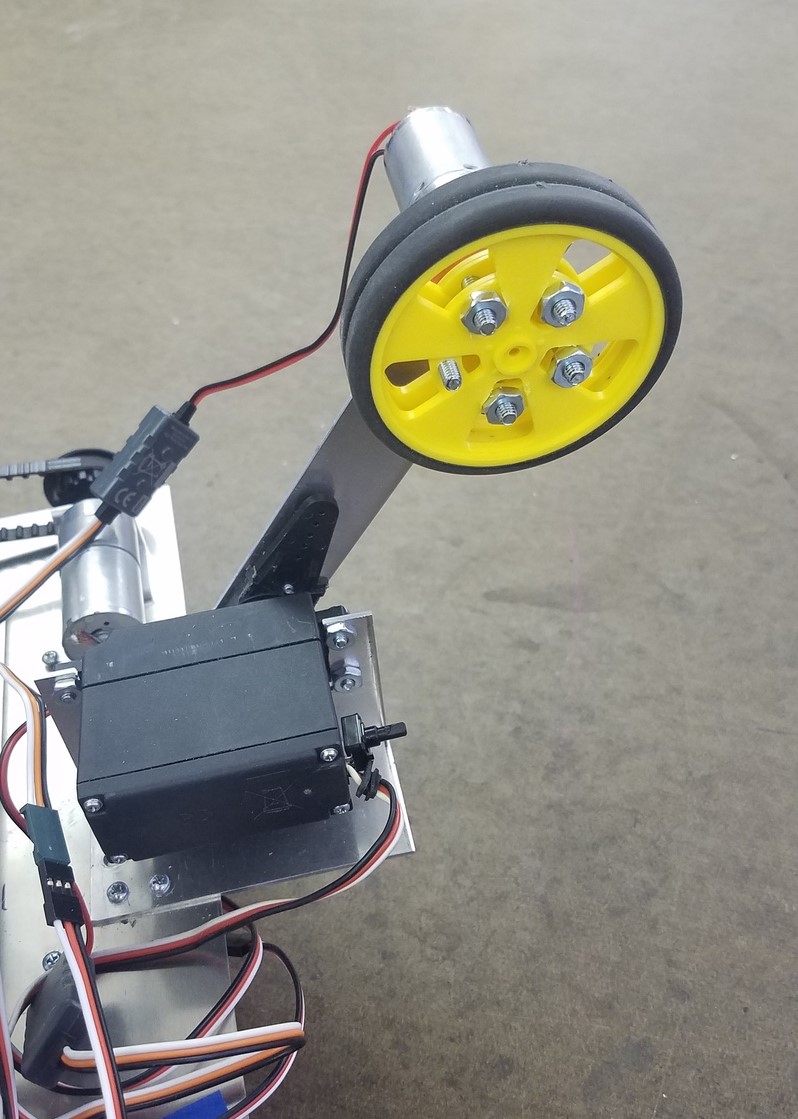
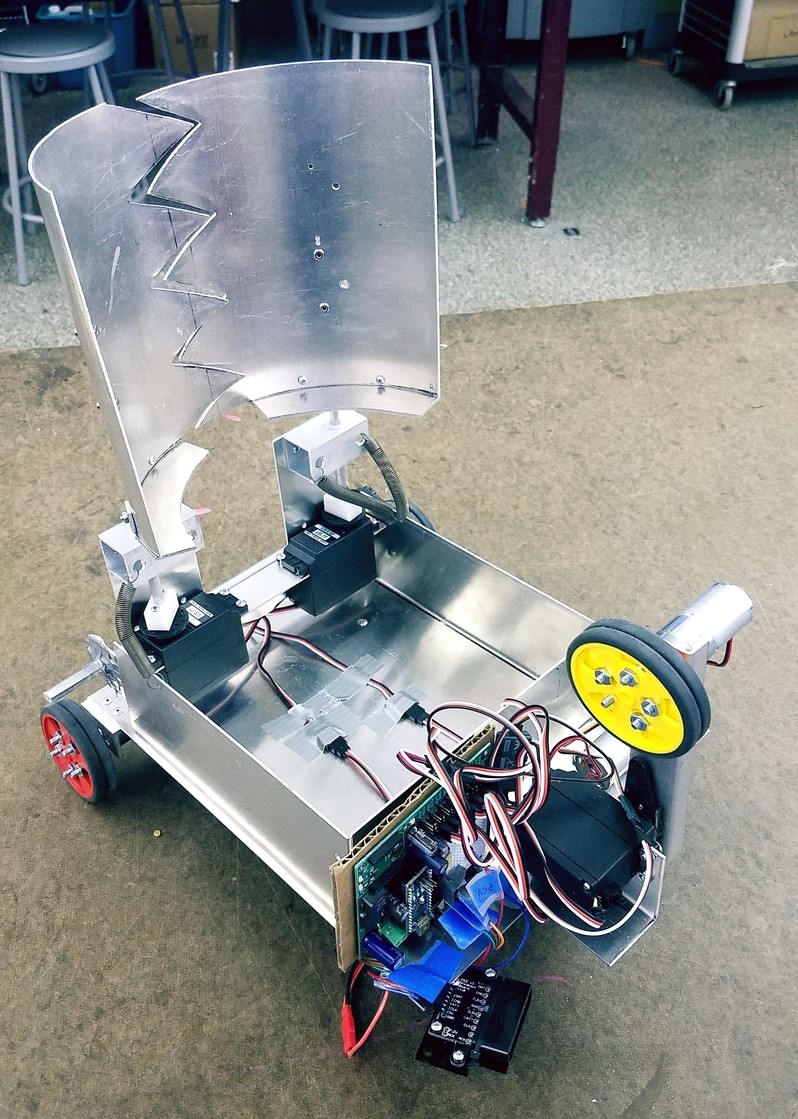
2.007 Design and Manufacturing
Feb 2019 - Jun 2019
The MIT mechanical engineering class that inspired the national FIRST Robotics program.
- Prototyped and designed mechanisms to plant a flag and retrieve moonrocks on a game board
- Manufactured and assembled all systems of the robot, including powertrain and transmission, using power tools and hand tools
- Programmed the robot in Arduino to respond to commands from a PlayStation game controller

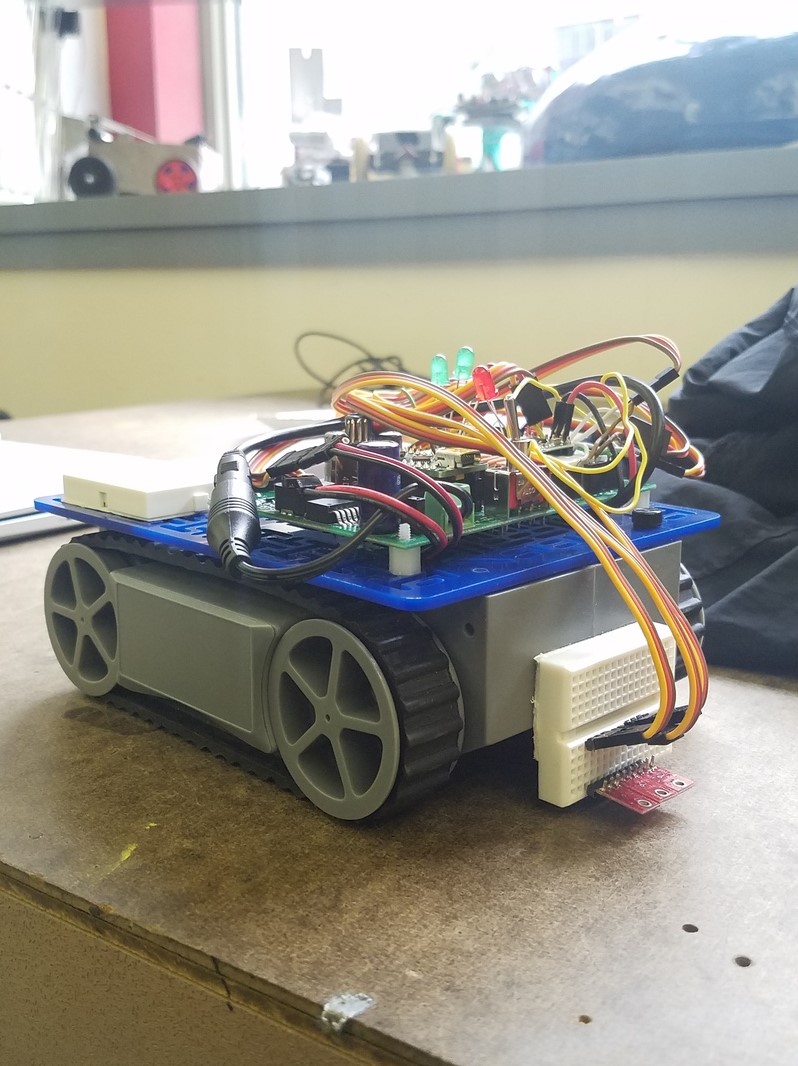
2.678 Autonomous Robot Competition
Feb 2019 - Jun 2019
Grand Champion
- Programmed and tested an autonomous robot that uses infrared sensors to follow a discontinuously marked course with sharp turns
- Won first place in the autonomous race out of ~60 students

2.00B Toy Product Design
Feb 2018 - Jun 2018
Entertainment and play-themed course that explores all stages of the product designing process, including brainstorming, sketch modeling, and prototyping. I worked in a team of four over the course of a semester to prototype a piano toy that paints onto a rolling sheet of paper.
- Designed, laser-cut, and 3D printed internal support structures for the piano using Solidworks and Adobe Illustrator
- Programmed speakers to synchronize with key presses using Arduino and wired connections for all electronics
- Delivered presentation of design ideas to an audience of more than 300 people

































{kind=link}